Электрический привод — Википедия
Электрический привод (сокращённо — электропривод, ЭП) — управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[1] и главным источником механической энергии в промышленности.
В ГОСТ Р 50369-92 электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса[2].
Как видно из определения, исполнительный орган в состав привода не входит. Однако авторы авторитетных учебников
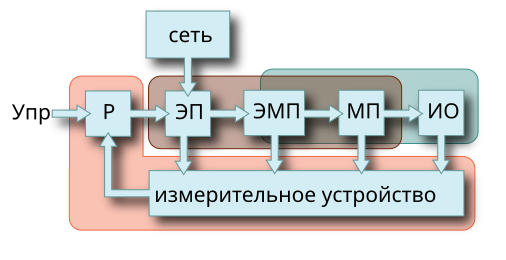
Функциональные элементы:
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя.
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Механическая часть.
- Система управления электропривода[4].
Статические характеристики[править | править код]
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика[править | править код]
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя[править | править код]
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика[править | править код]
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
По количеству и связи исполнительных, рабочих органов:
Классификация электроприводов по степени их автоматизации рабочих машин и механизмов и качеству выполняемых операций- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Автоматизированные электроприводы подразделяются еще на две подгруппы — разомкнутые и замкнутые. Работа разомкнутого привода заключается в том, что все внешние возмущения (для электрических приводов самым характерным из них является момент нагрузки) оказывают влияние на выходную переменную электрического привода, как пример — на его скорость. Иными словами, разомкнутый электрический привод не изолирован от влияния внешних возмущений, все изменения которых отражаются на его рабочих показателях. В разомкнутом приводе по этой причине не может обеспечиться высокий уровень качества регулирования переменных, хотя данный привод отличается простой схемой.
Основным отличием замкнутых электрических приводов является их общее или локальное удаление воздействий внешних возмущений на управляемую переменную электрического привода. В качестве примера можно привести тот факт что, скорость таких электрических приводов может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутый привод обеспечивает более качественное управление движением исполнительных органов, хотя его схемы являются более сложными и требуют, зачастую, применения силовых преобразователей энергии.
Замкнутый электропривод[править | править код]
Структура замкнутых электроприводов: а — с компенсацией возмущения; б — с обратной связью.Замкнутый электрический привод может быть построен по принципам отклонения с использованием обратных связей или компенсации внешнего возмущения.
Принцип компенсации мы можем рассмотреть на примере компенсации наиболее явно выраженного внешнего возмущения электропривода — момента нагрузки Мс при регулировании его скорости (рис.а).Основным признаком такой замкнутой структуры электрического привода является наличие цепи, по которой на вход привода вместе с задающим сигналом скорости подается сигнал UM = kMMQ, пропорциональный моменту нагрузки Мс. В результате этого управление ЭП осуществляется суммарным сигналом ошибки, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою высокую эффективность, электрические приводы по данной схеме выполняются крайне редко из-за отсутствия простых и надежных датчиков момента нагрузки М
Все виды применяемых в замкнутых электрических приводах обратных связей делятся на положительные и отрицательные, жесткие и гибкие, линейные и нелинейные.
Положительной называется обратная связь, в которой сигнал направлен согласно и складывается, с управляющим сигналом, в то время как сигнал отрицательной связи направлен в противоположную сторону (знак «минус» на рис. б).Жесткая обратная связь охарактеризована тем, что данная связь действует как в установившемся режиме, так и в переходном режиме электрического привода. Сигнал гибкой обратной связи производится только в переходных режимах электропривода и используется для обеспечения требуемого им качества, как пример устойчивости движения, допустимого перерегулирования и т.д.
Линейная обратная связь охарактеризована своей пропорциональной зависимостью между управляемой координатой и сигналом обратной свﮦязﮦи, в то время как при производстве нелинейной связи эта зависимость не будет пропорциональной.
Для регулирования движения исполнительных органов эксплуатируемых машин иногда требуется изменять несколько переменных электрического привода, например ток, момент и скорость. В таком случае замкнутые приводы создаются по одной из следующих структурных схем.
Электропривод с общим усилителем[править | править код]
Схема электропривода с общим усилителем.Схема с общим усилителем представлена на рисунке справа в качестве примера, данная схема является схемой регулирования двух переменных двигателя, где Д — скорости тока I. Схема содержит в себе силовой преобразователь электроэнергии П, устройство управления УУ, механическую передачу МП и датчики тока ДТ, скорости ДС и устройство токоограничения (токовой отсечки) УТО. Данная схема обеспечивает хорошую характеристику двигателя. На интервале скорости 0 — СOj за счет действия обратной связи по току (сигнал U) обеспечивается ограничение тока и момента двигателя и характеристика имеет близкий к вертикальному участок. При скорости Со > 00j узел УТО заканчивает действие связи по току и за счет наличия обратной связи по скорости (ОСС) (сигнал U ОCC) характеристика двигателя становится жестче ,что обеспечивает регулирование скорости.
Совокупность обратных связей, число которых может быть от двух и более, в схеме с единым усилителем образует своего рода модальный регулятор, а переменные при этом называются переменными состояния электропривода. Главной задачей модального регулятора можно считать обеспечение заданного качества динамических процессов в электроприводе — быстродействия, устойчивости и степени затухания переходных процессов. Это достигается выбором видов и соответствующим исследованием коэффициентов обратных связей по переменным электрического привода. Следует отметить, что система с суммирующим усилителем относится к системам управления с так называемой параллельной коррекцией.
Электропривод с наблюдающим устройством[править | править код]
Схема электропривода с наблюдающим устройствомВ сложных системах электроприводов, имеющих, в частных случаях, разветвленные кинематические цепи с упругими элементами, множество регулируемых переменных может оказаться весьма высоким. При данном факте измерение некоторых из них имеет некоторые затруднения по тем или иным причинам. В таких случаях прибегают к использованию так называемых наблюдающих устройств (наблюдателей).
Основную часть наблюдателя формируют совокупности моделей звеньев электрического привода, выполненных на основе операционных усилителей или элементов микропроцессорной техники. Выходные сигналы (напряжения) этих моделей, параметры которых соответствуют реально существующим звеньям электропривода, отображают близкие значения переменных.
Эксплуатация с применением наблюдателя на примере регулирования угла поворота вала двигателя поясняет структурная схема на рисунке 6, на которой приняты следующие обозначения: Д — двигатель, П — преобразователь, УУ — управляющее устройство, МП — механическая передача, НУ — наблюдающее устройство.
Электрический привод применяется для управления положением исполнительного органа φио. Это достигается соответствующим регулированием угла поворота φ вала двигателя, при котором необходимо также регулирование и других переменных — тока I, момента М и скорости двигателя.
Для применения рассматриваемого принципа управления, сигнал задания угла поворота фз подается на устройство управления УУ и одновременно на вход наблюдающего устройства НУ. Наблюдающее устройство НУ вырабатывает с помощью моделей звеньев привода сигналы, пропорциональные току, моменту и скорости, и направляет их устройству управления УУ.
Так же следует отметить, что модели звеньев не в состоянии учесть всех реальных возмущений, воздействующих на электрический привод и электрическую машину, и нестабильности параметров ЭП, НУ выдает в управляющее устройство не точные выражения переменных, а их оценки, что обозначено на схеме звездочкой «*».
Электропривод с подчиненной системой координат[править | править код]
Схема электропривода с подчиненным регулированием координатДля увеличения точности получаемых оценок переменных состояния может применяться корректирующая обратная связь по управляемой переменной, показанная выше штриховой линией. В данном случае значение выходной управляемой переменной ф сравнивают при помощи обратной связи с ее оценкой ф* и только затем в функции ошибки (выявленного отклонения) Дф корректируют показания отдельных моделей.
Структура с подчиненным управлением координат отличается тем, что в данной структуре регулирование каждой отдельной координаты осуществляется отдельными регуляторами — тока РТ и скорости PC, которые в свою очередь совместно с соответствующими обратными связями формируют замкнутые контуры. Они встраиваются таким образом, что входным, задающим сигналом для внутреннего контура тока U является выходной сигнал внешнего по отношению к нему контура скорости. Исходя из этого, внутренний контур тока зависит от внешнего контура скорости — основной управляемой координате электрического привода.
Главное достоинство схемы изображенной на рисунке заключается в возможности эффективной настройки управления каждой переменной как в статичном, так и в динамичном режимах, в силу чего она представляет из себя в настоящее время основу применение в электроприводе. Кроме того, зависимость контура тока от контура скорости позволяет простыми методами осуществлять ограничение тока и момента, для чего достаточно ограничить на соответствующем уровне сигнал на выходе регулятора скорости (он же — сигнал задания тока)
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
- ↑ 1 2 3 Ильинский Н. Ф. Основы электропривода: Учебное пособие для вузов. — 2-е изд., перераб. и доп. — М.: Издательство МЭИ, 2003. — С. 220. — ISBN 5-7046-0874-4.
- ↑ Электроприводы. Термины и определения.-М.- Издательство стандартов. −1993 [1]
- ↑ Онищенко Г.Б. Электрический привод. — М.: Академия, 2003.
- ↑ Анучин А.С. Системы управления электроприводов. — Москва: Издательский дом МЭИ, 2015. — 373 с. — ISBN 978-5-383-00918-5.
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — ISBN 5-7695-2306-9.
- Москаленко, В.В. Электрический привод. — 2-е изд. — М.: Академия, 2007. — ISBN 978-5-7695-2998-6.
- Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. Ленинград, Издательство «Энергоиздат», Ленинградское отделение, 1982
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода. — 6-е изд. — М.: Энергоиздат, 1981. — 576 с.
- Тищенко О. Ф. Элементы приборных устройств. — М.: Высшая школа, 1982. — 263 с.
Электропривод — это… Что такое Электропривод?
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
Виды электроприводов
- Нерегулируемые, простейшие, предназначенные для пуска и остановки двигателя, работающие в односкоростном режиме.
- Регулируемые, допускающие изменение частоты вращения и управление пуском и торможением электродвигателя для заданного технологического процесса. Способ регулирования зависит от типа двигателя. Так, для машин переменного тока применимо управление частотой, током в роторе. Для коллекторных машин применимо регулирование напряжением.
- Неавтоматизированные
- Автоматизированные
- Линейные — для частных случаев.
- Вращательные — наиболее распространённый тип. Чаще всего линейное перемещение получают механическими преобразователями вращательного движения двигателя.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
Принцип действия исполнительных механизмов не является ключевым фактором выбора электропривода, ключевыми в данном случае являются характеристики технологического процесса, которые должен обеспечить механизм. Этому же условию должен соответствовать и электропривод.
Например алгоритм выбора технических специалистов, обслуживающих технологические процессы, в которых исполнительным механизмом является трубопроводная арматура, будет следующим:
- Выполняемая функция: запорная, дросселирующее регулирование, запорно-регулирующий режим, отсечка и т.д.
- Пропускная способность.
- Транспортируемая среда: абразивная, агрессивная химически, вязкая пульпа, огнеопасный газ, пар и т.д.
- Время срабатывания арматуры (в зависимости от типа).
- Высокая ремонтопригодность и длительный срок службы.
Следует иметь ввиду, что не может быть универсального электропривода. В качестве примера, приведём средний медеплавильный цех: цех имеет несколько анодных печей, печи работают в разных режимах: загрузка, плавление, восстановление, окисление и это неполный перечень. Требуемые характеристики механизмов для этих режимов различны, на каждом процессе бывает задействована различная группа приводной арматуры. Диаметры разнятся от 200 до 900 мм, различны и подающиеся среды – мазут, газ, воздух и проч., температурные режимы так же изменяются.
С другой стороны, конструкция электропривода может быть модульной, части привода могут свободно меняться, причём блоки разных исполнений должны быть по возможности унифицированы и легко заменяться.
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на регулировочной характеристике, обычно на пониженной частоте вращения. В этом случае потери электроэнергии на регулировочной характеристике, сравнительно невелики, так как невелико время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках.
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. [1]
Число выпускаемых двигателей постоянного тока составляет лишь 4-5% числа двигателей переменного тока.
Современные российские производители электроприводов
Проблема регулирования скорости движения машин и механизмов с целью экономии электроэнергии решалась в последние десятилетия в основном с помощью регулируемых электроприводов. Причём, если ещё в 70-80-х годах преобладающими были регулируемые электроприводы постоянного тока, то в настоящее время они повсеместно вытесняются регулируемыми электроприводами переменного тока, как правило, с асинхронными электродвигателями с короткозамкнутым ротором. Объясняется это достижениями микроэлектроники, позволяющими реализовать небольшими аппаратными затратами довольно сложные алгоритмы управления электродвигателем переменного тока, который в общем случае предпочтительнее двигателя постоянного тока по надёжности, массе, габаритам и стоимости.
Некоторые из производителей в России и СНГ: ООО «Электропривод» (Украина, Запорожье), ОАО Завод «Преобразователь» (Украина, Запорожье), ОАО «Запорожский электроаппаратный завод», НИПТИЭМ, ОАО «Владимир», ООО «АВВИ», ООО «Двигатель», «ТОМЗЭЛ», ЗАО Томск, ООО «Кранприборсервис» на базе СКТБ Башенного Краностроения (СКТББК г. Москва), ЗАО «Комбарко» (Россия, г. Москва), ООО НПФ «Ирбис» (г. Новосибирск), ООО «ЧЭАЗ — ЭЛПРИ» (дочернее предприятие ОАО «Чебоксарский электроаппаратный завод»), НТЦ «Приводная техника» (г. Челябинск), НПП «Уралэлектра» (г. Екатеринбург).
В статье А. Колпакова дан полный обзор российских производителей электроприводов.
См. также
Примечания
Ссылки
Wikimedia Foundation. 2010.
Электропривод и его основные компоненты
Электрический привод, сокращенно электропривод — электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса [1].
Функциональная схема электропривода, где ЭП — электрический преобразователь, ИУ — информационное устройство, ЭМП — электромеханический преобразователь (электродвигатель), МП — механический преобразователь, ИО — исполнительный орган.
Основные компоненты
Электродвигатель
Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.
Система управления электропривода
Совокупность управляющих и информационных устройств и устройств сопряжения электропривода, предназначенных для управления электромеханическим преобразованием энергии с целью обеспечения заданного движения исполнительного органа рабочей машины.
Механический преобразователь
Предназначен для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласованию вида и скоростей их движения.
- Вращательный
- Прямолинейный
- Поступательный
- Со сложным движением
Полезная информация
База знаний
Описание разных видов электромеханических преобразователей и электрических машин в частности. Ключевые даты истории создания электродвигателя.
Электрические приводы. Виды и устройство. Применение и работа
Электропривод – электромеханическая система, служащая для привода в движение функциональных органов машин и агрегатов для выполнения определенного технологического процесса. Электрические приводы состоят из электродвигателя, устройства преобразования, управления и передачи.
С прогрессом промышленного производства электрические приводы заняли в быту и на производстве лидирующую позицию по числу электродвигателей и общей мощности. Рассмотрим структуру, типы, классификацию электроприводов, и предъявляемые к нему требования.
Устройство
1 — Передний крепеж
2 — Винтовая передача
3 — Концевой датчик
4 — Электродвигатель
5 — Зубчатая передача
6 — Задний крепеж
Функциональные компоненты
- Р – регулятор служит для управления электроприводом.
- ЭП – электрический преобразователь служит для преобразования электроэнергии в регулируемую величину напряжения.
- ЭМП – электромеханический преобразователь электричества в механическую энергию.
- МП – механический преобразователь способен изменять быстродействие и характер движения двигателя.
- Упр – управляющее действие.
- ИО – исполнительный орган.
Функциональные части
- Электропривод.
- Механическая часть.
- Система управления.
Исполнительный механизм является устройством, которое смещает рабочую деталь по поступающему сигналу от управляющего механизма. Рабочими деталями могут быть шиберы, клапаны, задвижки, заслонки. Они изменяют количество поступающего вещества на объект.
Рабочие органы могут двигаться поступательно, вращательно в определенных пределах. С их участием производится воздействие на объект. Чаще всего электропривод с исполнительным механизмом состоят из электропривода, редуктора, датчиков положения и узла обратной связи.
Сегодня электрические приводы модернизируются по их снижению веса, эффективности действия, экономичности, долговечности и надежности.
Свойства привода
- Статические. Механическая и электромеханическая характеристика.
- Механические. Это зависимость скорости вращения от момента сопротивления. При анализе динамических режимов механические характеристики полезны и удобны.
- Электромеханические. Это зависимость скорости вращения от тока.
- Динамические. Это зависимость координат электропривода в определенный момент времени при переходном режиме.
Классификация
Электрические приводы обычно классифицируются по различным параметрам и свойствам, присущим им. Рассмотрим основные из них.
По виду движения:
- Вращательные.
- Поступательные.
- Реверсивные.
- Возвратно-поступательные.
По принципу регулирования:
- Нерегулируемый.
- Регулируемый.
- Следящий.
- Программно управляемый.
- Адаптивный. Автоматически создает оптимальный режим при изменении условий.
- Позиционный.
По виду передаточного устройства:
- Редукторный.
- Безредукторный.
- Электрогидравлический.
- Магнитогидродинамический.
По виду преобразовательного устройства:
- Вентильный. Преобразователем является транзистор или тиристор.
- Выпрямитель-двигатель. Преобразователем является выпрямитель напряжения.
- Частотный преобразователь-двигатель. Преобразователем является регулируемый частотник.
- Генератор-двигатель.
- Магнитный усилитель-двигатель.
По методу передачи энергии:
- Групповой. От одного мотора через трансмиссию приводятся в движение другие исполнительные органы рабочих машин. В таком приводе очень сложное устройство кинематической цепи. Электрические приводы такого вида являются неэкономичными из-за их сложной эксплуатации и автоматизации. Поэтому такой привод сегодня не нашел широкого применения.
- Индивидуальный. Он характерен наличием у каждого исполнительного органа отдельного электродвигателя. Такой привод является одним из основных на сегодняшний день, так как кинематическая передача имеет простое устройство, улучшены условия техобслуживания и автоматизации. Индивидуальный привод нашел популярность в современных механизмах: сложных станках, роботах-манипуляторах, подъемных машинах.
- Взаимосвязанный. Такой привод имеет несколько связанных электроприводов. При их функционировании поддерживается соотношение скоростей и нагрузок, а также положение органов машин. Взаимосвязанные электрические приводы необходимы по соображениям технологии и устройству. Для примера можно назвать привод ленточного конвейера, механизма поворота экскаватора, или шестерни винтового пресса большой мощности. Для постоянного соотношения скоростей без механической связи применяется схема электрической связи нескольких двигателей. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
По уровню автоматизации:
- Автоматизированные.
- Неавтоматизированные.
- Автоматические.
По роду тока:
- Постоянного тока.
- Переменного тока.
По важности операций:
- Главный привод.
- Вспомогательный привод.
Подбор электродвигателя
Чтобы приводы производили качественную работу, необходимо правильно выбрать электрический двигатель. Это создаст условия долгой и надежной работы, а также повысит эффективность производства.
При подборе электродвигателя для привода агрегатов целесообразно следовать некоторым советам по:
- Требованиям технологического процесса выбирают двигатель с соответствующими характеристиками, конструктивного исполнения, а также метода фиксации и монтажа.
- Соображениям экономии подбирают надежный, экономичный и простой двигатель, который не нуждается в больших расходах на эксплуатацию, имеет малый вес, низкую цену и небольшие размеры.
- Условиям внешней среды и безопасности подбирают соответствующее исполнение мотора.
Правильный подбор электродвигателя обуславливает технико-экономические свойства всего привода, его надежность и длительный срок работы.
Преимущества
- Возможность более точного подбора мощности двигателя для электропривода.
- Электрический мотор менее пожароопасен в отличие от других типов двигателей.
- Приводы дают возможность быстрого пуска и остановки механизма, его плавного торможения.
- Нет необходимости в специальных регуляторах питания для электродвигателя. Все процессы происходят в автоматическом режиме.
- Приводы дают возможность подбора мотора, свойства которого лучше других моделей сочетаются с характеристиками агрегата.
- С помощью электрического привода можно плавно регулировать обороты механизма в определенных пределах.
- Электродвигатель может преодолеть большие и долговременные перегрузки.
- Электропривод дает возможность получения максимальной скорости и производительности рабочего механизма.
- Электродвигатель дает возможность экономить электричество, а при определенных условиях даже генерировать ее в сеть.
- Полная и простая автоматизация установок и механизмов возможна только с помощью электроприводов.
- КПД электромоторов имеет наибольший показатель по сравнения с другими моделями двигателей.
- Моторы производят с повышенной уравновешенностью. Это дает возможность встраивания их в механизмы машин, делать менее массивным фундамент.
Инновационные электрические приводы все автоматизированы. Системы управления приводом дают возможность рационального построения технологических процессов, увеличить производительность и эффективность труда, оптимизировать качество продукции и уменьшить ее цену.
Технические требования
К любым техническим механизмам и агрегатам предъявляются определенные требования технического плана. Не стали исключением и электроприводы. Рассмотрим основные предъявляемые к ним требования.
Надежность
В соответствии с этим требованием привод должен исполнять определенные функции и заданных условиях в течение некоторого интервала времени, с расчетной вероятностью работы без возникновения неисправностей.
При невыполнении этих требований остальные свойства оказываются бесполезными. Надежность может значительно отличаться в зависимости от характера работы. В некоторых механизмах не требуется долгого времени работы, однако отказ механизма не должен иметь место. Такой пример можно найти в военной промышленности. И другой пример, где наоборот, время службы должно быть большим, а отказ устройства вполне возможен, и не приведет к серьезным последствиям.
Точность
Это требование связано с отличием показателей от заданных. Они не могут превышать допустимые величины. Электроприводы должны обеспечивать перемещение рабочего элемента на определенный угол или за некоторое время, а также поддерживать на определенном уровне скорость, ускорение или момент вращения.
Быстродействие
Это качество привода обеспечивает быструю реакцию на разные воздействия управления. Быстродействие связано с точностью.
Качество
Такая характеристика обеспечивает качество процессов перехода, исполнение определенных закономерностей их выполнения. Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Энергетическая эффективность
Любые производственные процессы преобразования и передачи имеют потери энергии. Наиболее важным это качество стало в применении электроприводов механизмов, приводах значительной мощности, долгим режимом эксплуатации. Эффективность использования энергии определяется КПД.
Совместимость
Электрические приводы должны совмещаться с работой аппаратуры, в которой они применяются, с их системой снабжения электроэнергией, информационными данными, а также с рабочими элементами. Наиболее остро стоит требование совместимости электроприводов для медицинской и бытовой техники, в радиотехнике.
Похожие темы:
Электропривод — это… Что такое Электропривод?
электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом Привода. Историческая справка. Создание первого Э. относится к 1838, когда в России Б. С. Якоби произвел испытания электродвигателя постоянного тока с питанием от аккумуляторной батареи, который был использован для привода гребного винта судна. Однако внедрение Э в промышленность сдерживалось отсутствием надежных источников электроэнергии. Даже после создания в 1870 промышленного электромашинного генератора постоянного тока работы по внедрению Э. имели лишь частное значение и не играли заметной практической роли. Начало широкого промышленного применения Э связано с открытием явления вращающегося магнитного поля (См. Вращающееся магнитное поле) и созданием трехфазного асинхронного электродвигателя (См. Асинхронный электродвигатель), сконструированного М. О. Доливо-Добровольским (См. Доливо-Добровольский). В 90-х гг. широкое распространение на промышленных предприятиях получил Э., в котором использовался асинхронный электродвигатель с фазным ротором для сообщения движения исполнительным органам рабочих машин. В 1890 суммарная мощность электродвигателей по отношению к мощности двигателей всех типов, применяемых в промышленности, составила 5%, уже в 1927 этот показатель достиг 75%, а в 1976 приближался к 100%. Значительная доля принадлежит Э., используемому на транспорте. Основные типы Э. По конструктивному признаку можно выделить три основных типа Э.: одиночный, групповой и многодвигательный. Одиночный Э. применяют в ручных машинах (См. Ручные машины), простых металлообрабатывающих и древообрабатывающих станках и приборах бытовой техники. Групповой, или трансмиссионный, Э. в современном производстве практически не применяется. Многодвигательные Э. — приводы многооперационных металлорежущих станков, мономоторный тяговый Э. рельсовых транспортных средств. Кроме того, различают Э. реверсивные и нереверсивные (см. Реверсивный электропривод), а по возможности управления потоком преобразованной механической энергии — нерегулируемые и регулируемые (в том числе автоматизированный с программным управлением и др.)Основные части Э. Э. всех типов содержат основные части, имеющие одинаковое назначение: исполнительную и устройства управления.
Исполнительная часть Э. состоит обычно из одного или нескольких электродвигателей (см. Двигатель электрический) и передаточного механизма — устройства для передачи механической энергии двигателя рабочему органу приводимой машины. В нерегулируемых Э. чаще всего используют электродвигатели переменного тока, подключаемые к источнику питания либо через контактор или автоматический выключатель, играющий роль защитного устройства, либо при помощи штепсельного разъёма (например, в бытовых электроприборах). Частота вращения ротора электродвигателя такого привода, а следовательно, и скорость перемещения связанного с ним рабочего механизма, изменяется только в зависимости от нагрузки исполнительного механизма. В мощных нерегулируемых Э. применяют асинхронные электродвигатели. Для ограничения пусковых токов между двигателем и источником устанавливают пусковые реакторы или автотрансформаторы, которые после разгона двигателя отключают. В регулируемых Э. чаще всего применяют электродвигатели постоянного тока, частоту вращения якорей которых можно изменять плавно, т. е. непрерывно, в широком диапазоне при помощи достаточно простых устройств управления. В устройства управления входят: кнопочный пульт (для пуска и останова электродвигателя), Контакторы, блок-контакты, преобразователи частоты и напряжения, предохранители, а также блоки защиты от перегрузок в аварийных режимах. При питании Э. от источника переменного тока, что характерно для Э., используемых в промышленности и на электроподвижном составе, двигатели которого питаются от сети переменного тока, в качестве преобразующих устройств применяют электромашинные или статические преобразователи электроэнергии — выпрямители. При питании от источника постоянного тока, что характерно для автономных электроэнергетических систем и электроподвижного состава, двигатели которого питаются от сети постоянного тока, преобразующие устройства выполняют в виде релейно-контакторных систем или статических преобразователей (см. Преобразовательная техника). В 70-е гг. 20 в. всё чаще и в регулируемых Э. стали применять трёхфазные асинхронные и синхронные двигатели, регулирование режимов работы которых осуществляют с помощью статических, в основном полупроводниковых, преобразователей частоты (См. Преобразователь частоты). Э. со статическими преобразователями энергии, выполненными на базе ртутных или полупроводниковых вентилей, называются вентильными Э. Единичная мощность вентильных Э. переменного тока, используемых, например, для шахтных мельниц, достигает 10 Мвт и более. Применение в Э. вентильных преобразовательных устройств позволяет решать наиболее экономичным образом задачу возврата энергии от электродвигателя источнику питания (см. Рекуперативное торможение). К важным показателям, определяющим характеристики устройств управления регулируемого Э., следует отнести плавность регулирования режима работы рабочего механизма, во многом зависящую от плавности регулирования приводного электродвигателя, и быстродействие. Релейно-контакторные устройства управления при сравнительно низком быстродействии обеспечивают ступенчатое (дискретное) регулирование режимов работы, быстродействующие статические системы — непрерывное регулирование. В простейших Э. относительно небольшой мощности операции, связанные с регулированием режима работы исполнительного механизма, производят при помощи ручного управления. Недостатком ручного управления является инерционность процесса регулирования и вызываемое этим снижение производительности исполнительного механизма, а также невозможность точного воспроизведения повторяющихся производственных процессов (например, при частых пусках). Регулирование режимов работы исполнительных механизмов Э. обычно осуществляют при помощи устройств автоматического управления. Такой Э., называется автоматизированным, широко используется в системах автоматического управления (САУ). В разомкнутых САУ изменение возмущающего воздействия (например, нагрузки на валу электродвигателя) вызывает изменение заданного режима работы Э. В замкнутых САУ благодаря связи между входом и выходом системы во всех режимах работы автоматически поддерживаются заданные характеристики, которые при этом можно и регулировать по определенному закону. В таких системах находят все более широкое применение ЭВМ. Одной из разновидностей автоматизированного Э. является Следящий электропривод, в котором исполнительный орган с определённой точностью воспроизводит движения рабочего механизма, задаваемые управляющим органом. По способу действия различают следящие Э. с релейным, или дискретным, управлением и с непрерывным управлением. Следящие Э. характеризуются мощностями от нескольких вт до десятков и сотен квт, применяются в различных промышленных установках, военной технике и др. В 60-е гг. 20 в. в различных областях техники нашли применение Э. с числовым программным управлением (ЧПУ). Такой Э. используют в многооперационных металлорежущих станках, автоматических и полуавтоматических линиях. Создание автоматизированного Э. для обслуживания отдельных технологических операций и процессов — основа комплексной автоматизации производства. Для решения этой задачи необходимо совершенствование Э. как в направлении расширения диапазона мощностей Э. и возможностей регулирования, так и в направлении повышения надёжности и создания Э. с оптимальными габаритами и массой.Лит.: Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971; Авен О. И., Доманицкий С. М., Бесконтактные исполнительные устройства промышленной автоматики, М. — Л., 1960; Электропривод систем управления летательных аппаратов. М., 1973; Основы автоматизированного электропривода, М., 1974.
Ю. М. Иньков.
Электропривод — это… Что такое Электропривод?
электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом Привода. Историческая справка. Создание первого Э. относится к 1838, когда в России Б. С. Якоби произвел испытания электродвигателя постоянного тока с питанием от аккумуляторной батареи, который был использован для привода гребного винта судна. Однако внедрение Э в промышленность сдерживалось отсутствием надежных источников электроэнергии. Даже после создания в 1870 промышленного электромашинного генератора постоянного тока работы по внедрению Э. имели лишь частное значение и не играли заметной практической роли. Начало широкого промышленного применения Э связано с открытием явления вращающегося магнитного поля (См. Вращающееся магнитное поле) и созданием трехфазного асинхронного электродвигателя (См. Асинхронный электродвигатель), сконструированного М. О. Доливо-Добровольским (См. Доливо-Добровольский). В 90-х гг. широкое распространение на промышленных предприятиях получил Э., в котором использовался асинхронный электродвигатель с фазным ротором для сообщения движения исполнительным органам рабочих машин. В 1890 суммарная мощность электродвигателей по отношению к мощности двигателей всех типов, применяемых в промышленности, составила 5%, уже в 1927 этот показатель достиг 75%, а в 1976 приближался к 100%. Значительная доля принадлежит Э., используемому на транспорте. Основные типы Э. По конструктивному признаку можно выделить три основных типа Э.: одиночный, групповой и многодвигательный. Одиночный Э. применяют в ручных машинах (См. Ручные машины), простых металлообрабатывающих и древообрабатывающих станках и приборах бытовой техники. Групповой, или трансмиссионный, Э. в современном производстве практически не применяется. Многодвигательные Э. — приводы многооперационных металлорежущих станков, мономоторный тяговый Э. рельсовых транспортных средств. Кроме того, различают Э. реверсивные и нереверсивные (см. Реверсивный электропривод), а по возможности управления потоком преобразованной механической энергии — нерегулируемые и регулируемые (в том числе автоматизированный с программным управлением и др.)Основные части Э. Э. всех типов содержат основные части, имеющие одинаковое назначение: исполнительную и устройства управления.
Исполнительная часть Э. состоит обычно из одного или нескольких электродвигателей (см. Двигатель электрический) и передаточного механизма — устройства для передачи механической энергии двигателя рабочему органу приводимой машины. В нерегулируемых Э. чаще всего используют электродвигатели переменного тока, подключаемые к источнику питания либо через контактор или автоматический выключатель, играющий роль защитного устройства, либо при помощи штепсельного разъёма (например, в бытовых электроприборах). Частота вращения ротора электродвигателя такого привода, а следовательно, и скорость перемещения связанного с ним рабочего механизма, изменяется только в зависимости от нагрузки исполнительного механизма. В мощных нерегулируемых Э. применяют асинхронные электродвигатели. Для ограничения пусковых токов между двигателем и источником устанавливают пусковые реакторы или автотрансформаторы, которые после разгона двигателя отключают. В регулируемых Э. чаще всего применяют электродвигатели постоянного тока, частоту вращения якорей которых можно изменять плавно, т. е. непрерывно, в широком диапазоне при помощи достаточно простых устройств управления. В устройства управления входят: кнопочный пульт (для пуска и останова электродвигателя), Контакторы, блок-контакты, преобразователи частоты и напряжения, предохранители, а также блоки защиты от перегрузок в аварийных режимах. При питании Э. от источника переменного тока, что характерно для Э., используемых в промышленности и на электроподвижном составе, двигатели которого питаются от сети переменного тока, в качестве преобразующих устройств применяют электромашинные или статические преобразователи электроэнергии — выпрямители. При питании от источника постоянного тока, что характерно для автономных электроэнергетических систем и электроподвижного состава, двигатели которого питаются от сети постоянного тока, преобразующие устройства выполняют в виде релейно-контакторных систем или статических преобразователей (см. Преобразовательная техника). В 70-е гг. 20 в. всё чаще и в регулируемых Э. стали применять трёхфазные асинхронные и синхронные двигатели, регулирование режимов работы которых осуществляют с помощью статических, в основном полупроводниковых, преобразователей частоты (См. Преобразователь частоты). Э. со статическими преобразователями энергии, выполненными на базе ртутных или полупроводниковых вентилей, называются вентильными Э. Единичная мощность вентильных Э. переменного тока, используемых, например, для шахтных мельниц, достигает 10 Мвт и более. Применение в Э. вентильных преобразовательных устройств позволяет решать наиболее экономичным образом задачу возврата энергии от электродвигателя источнику питания (см. Рекуперативное торможение). К важным показателям, определяющим характеристики устройств управления регулируемого Э., следует отнести плавность регулирования режима работы рабочего механизма, во многом зависящую от плавности регулирования приводного электродвигателя, и быстродействие. Релейно-контакторные устройства управления при сравнительно низком быстродействии обеспечивают ступенчатое (дискретное) регулирование режимов работы, быстродействующие статические системы — непрерывное регулирование. В простейших Э. относительно небольшой мощности операции, связанные с регулированием режима работы исполнительного механизма, производят при помощи ручного управления. Недостатком ручного управления является инерционность процесса регулирования и вызываемое этим снижение производительности исполнительного механизма, а также невозможность точного воспроизведения повторяющихся производственных процессов (например, при частых пусках). Регулирование режимов работы исполнительных механизмов Э. обычно осуществляют при помощи устройств автоматического управления. Такой Э., называется автоматизированным, широко используется в системах автоматического управления (САУ). В разомкнутых САУ изменение возмущающего воздействия (например, нагрузки на валу электродвигателя) вызывает изменение заданного режима работы Э. В замкнутых САУ благодаря связи между входом и выходом системы во всех режимах работы автоматически поддерживаются заданные характеристики, которые при этом можно и регулировать по определенному закону. В таких системах находят все более широкое применение ЭВМ. Одной из разновидностей автоматизированного Э. является Следящий электропривод, в котором исполнительный орган с определённой точностью воспроизводит движения рабочего механизма, задаваемые управляющим органом. По способу действия различают следящие Э. с релейным, или дискретным, управлением и с непрерывным управлением. Следящие Э. характеризуются мощностями от нескольких вт до десятков и сотен квт, применяются в различных промышленных установках, военной технике и др. В 60-е гг. 20 в. в различных областях техники нашли применение Э. с числовым программным управлением (ЧПУ). Такой Э. используют в многооперационных металлорежущих станках, автоматических и полуавтоматических линиях. Создание автоматизированного Э. для обслуживания отдельных технологических операций и процессов — основа комплексной автоматизации производства. Для решения этой задачи необходимо совершенствование Э. как в направлении расширения диапазона мощностей Э. и возможностей регулирования, так и в направлении повышения надёжности и создания Э. с оптимальными габаритами и массой.Лит.: Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971; Авен О. И., Доманицкий С. М., Бесконтактные исполнительные устройства промышленной автоматики, М. — Л., 1960; Электропривод систем управления летательных аппаратов. М., 1973; Основы автоматизированного электропривода, М., 1974.
Ю. М. Иньков.
Электрический привод — это… Что такое Электрический привод?
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[1] и главным источником механической энергии в промышленности.
Определение по ГОСТу Р 50369-92 [2] Электропривод — электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Как видно из определения, исполнительный орган в состав привода не входит. Однако, авторы авторитетных учебников [1][3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей также учитываются при проектировании электропривода.
Функциональная схема
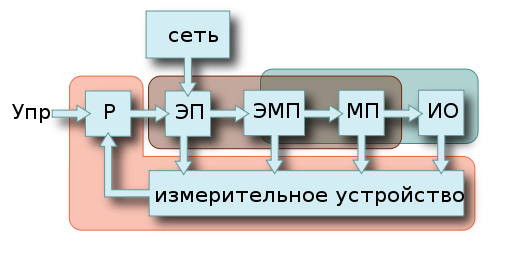
Функциональные элементы:
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя, а также характер движения (с поступательного на вращательное или с вращательного на поступательное).
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть.
- Система управления электропривода.
Характеристики привода
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
Классификация электроприводов[4]
По количеству и связи исполнительных, рабочих органов.
- Индивидуальный, в котором рабочий исполнительный орган приводится одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления.
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения.
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства.
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока.
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций.
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на искусственной характеристике, обычно на пониженной частоте вращения. В этом случае потери электроэнергии на искусственной характеристике сравнительно невелики, так как мало время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках. Поэтому, благодаря простоте реализации метода регулирования скорости путём изменения сопротивления в цепи ротора, такие электроприводы нашли наиболее широкое применение в крановых системах, и сейчас составляют основную часть находящихся в эксплуатации и выпускаемых промышленностью электроприводов. В то же время растет число электроприводов с плавным регулированием скорости, в первую очередь к ним относятся электроприводы по системам «тиристорный преобразователь — двигатель постоянного тока» (ТП-Д) и «преобразователь частоты — асинхронный двигатель» (ПЧ-АД).
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени[когда?] они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. В настоящее время двигатели постоянного тока вытесняются короткозамкнутыми асинхронными двигателями с преобразователями частоты, а также синхронными двигателями с постоянными магнитами на роторе и шаговыми. Число выпускаемых двигателей постоянного тока составляет лишь 4-5 % числа двигателей переменного тока и неуклонно снижается[источник не указан 632 дня].
См. также
Примечания
- ↑ 1 2 3 Ильинский Н. Ф. Основы электропривода: Учебное пособие для вузов. — 2-е изд., перераб. и доп. — М.: Издательство МЭИ, 2003. — С. 220. — ISBN 5-7046-0874-4
- ↑ Электроприводы. Термины и определения.-М.- Издательство стандартов. -1993 [1]
- ↑ Онищенко Г.Б. Электрический привод. — М.: Академия, 2003.
- ↑ ГОСТ — 16593 ЭП
Литература
- Соколовский Г. Г.: Электроприводы переменного тока с частотным регулированием, М: «Академия», 2006, ISBN 5-7695-2306-9
- Москаленко, В.В. Электрический привод. — 2-е изд. — М.: Академия, 2007. — ISBN 978-5-7695-2998-6
- Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. Ленинград, Издательство «Энергоиздат», Ленинградское отделение, 1982